

Autonomous underwater vehicles such as the Hugin 4500, shown above, have been a part of the search for Malaysia Airlines Flight 370 nearly from the beginning, but parallete operation of multiple AUVs only became part of the search in 2018.
A new chapter in the protracted search for Malaysia Airlines’ lost airliner (MH370) may have important implications for future undersea warfare. Autonomous underwater vehicles (AUVs) are participating in a renewed search for the missing flight this year in novel ways. In the past, use of AUVs in aviation disasters mostly has been limited to narrowly tailored searches to recover cockpit and flight data recorders—often from remarkable depths. Even when airliners vanished while flying on their planned flight paths, finding them could be challenging, as in the 2009 case of Air France Flight 447 that took almost two years to locate. MH370 was far from its planned flight path—no one knows why—causing widely scattered areas to be searched based on guesses, most recently using the Boeing 777’s fuel capacity and recovery of a small amount of wreckage washed ashore thousands of miles away. A three-year-long search covering 120,000 square kilometers found nothing. This year’s search area covers 25,000 km2, some 1,700 to 2,200 km off the west coast of Australia.
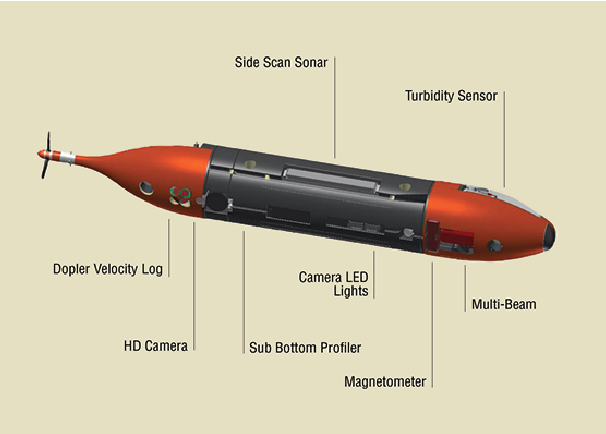
What is new to this effort is the use of an array of multiple, coordinated AUVs capable of diving almost 50 percent deeper than their predecessors. In January, the Norwegian ship Seabed Constructor left Durban, South Africa, for the search area in the Indian Ocean, carrying eight Hugin AUVs manufactured by Norway’s Kongsberg Maritime. Kongsberg’s website notes that the AUVs employ sidescan sonar, a multibeam echosounder, a bottom profiler, a high-definition camera, a self-compensating magnetometer, a synthetic aperture sonar, a turbidity sensor, and a conductivity/temperature/depth sensor. Each AUV has a 60-hour endurance but returns periodically to the vessel to offload its two-terabyte memory through an acoustic modem, a process that takes up to six hours.
The Norwegian ship previously has operated six Hugins in parallel. With a claimed search rate of 1,200 km2 per day, it can search the whole area in about three weeks, the company says. The previous search averaged about 110 square kilometers per day over three years. Parallel operation is different from single-AUV operation. Normally, an AUV explores the seabed until it finds something potentially interesting, at which point that object is examined more closely, usually by the same AUV.
In parallel operation, the search is conducted in two different phases. First, the entire area is mapped. Then, the map is examined to decide whether anything of interest is present. Objects of interest are reexamined using different sensors—such as underwater cameras—and some objects then will be recovered. If any MH370 wreckage is found, the search almost certainly will shift to finding the main prize—cockpit voice and flight data recorders.
This technique makes precise navigation crucial, because it falls apart unless any point in the carefully constructed map of the ocean bottom can be revisited at will. There is too much non-airliner junk on even the cleanest sea bottom to rely on today’s on-board sensors for decision making. The AUVs need considerable intelligence, because they have to deal with unexpected ocean features such as cliffs and gullies, and even with large fish, but analysts on the ship must examine manually the AUV maps to create a list of objects worth revisiting.
The Hugin 6000s used in the renewed search for the missing airliner are capable of deeper and more sustained operation than their predecessors and can be teamed in parallel with other vehicles for rapid, accurate underwater search.
The AUVs have on-board inertial navigation systems, but over a long, slow swim errors accumulate. Surfacing from a depth of 6,000 meters to consult GPS periodically is impractical—as indeed it would be if the AUVs were hunting mines in enemy coastal waters—so the AUVs use various methods to fix their location, including communication with the acoustic modem. The ship can check its own position with high precision, and it has computer-controlled thrusters to keep it in place.
Searching for aircraft remains is not quite minehunting, but it is closely related. The Royal Norwegian Navy uses Hugin AUVs to support minehunting, typically employing one AUV per mine countermeasures ship. The most frequently stated virtue of the AUV is that it keeps crews out of the target minefield. (For more on the benefits of AUVs in mine countermeasures, see “This ‘Fish’ Hunts Mines, January 2018 Proceedings.) Unfortunately, protracted minehunting off an enemy shore may warn an enemy to move troops into position, turning an unopposed landing into something far worse.
The Seabed Constructor improves its search rate by using more AUVs. This is not quite the “swarm” concept being developed for unmanned aerial vehicles. Swarming involves communication among the vehicles, so they can cooperate. In the future, a swarm of minehunting AUVs might decide to concentrate effort in one part or another of a defined search area, to generate multiple images of the same area from different perspectives—to make it much easier to decide whether a suspicious object is a mine, for instance. A single AUV in the swarm that found nothing along a search track might decide to look elsewhere or might direct other AUVs to do so. But the parallel Hugin AUVs searching for MH370 do not cooperate autonomously, although their ability to communicate acoustically with the search ship suggests that they have that potential.
Beyond minehunting, parallel AUVs eventually also might contribute to the other significant underwater naval search problem—for submarines. The littorals are a particularly difficult environment in which to hunt. Hull sonar range there tends to be quite limited because pings bounce off the surface and the bottom. Low-frequency dipping sonars seem not to be very successful because their beams also suffer surface- and bottom-reflection problems. The original concept for the antisubmarine module on the littoral combat ship was to have solved this problem by merging data from numerous remote short-range sensors into a usable tactical picture. Technical problems have led the ship instead to employ conventional towed-array and multidepth sonars.
The swarm approach offers the possibility of a very different kind of antisubmarine warfare. When the object of a hunter is to find and track a few submarines, creating a map can seem unnecessarily laborious, but it does have interesting implications. A dynamic map generated by a swarm offers a precise enough track for a hunter to prosecute an attack that will then come as a total surprise to the submarine commander.
At present, generating a target solution usually warns the hunted submarine because, even if the enemy is detected passively at first, some active sonar operation is required to generate a firing solution. The presence of a swarm would warn a submarine commander he was in danger, but he never would know when he was about to be attacked—whether he sat on the bottom or moved.
The Cold War–era sound surveillance system (SOSUS) provided something similar on a different scale. The SOSUS arrays tracked Soviet submarines in the North Atlantic and Pacific oceans, allowing U.S. and allied maritime patrol aircraft, ships, and submarines to intercept the Soviets. Though SOSUS contacts were not nearly precise enough for instantaneous attacks, unlike the AUV-swarm concept, from a psychological point of view, the key reality was that a Soviet submarine commander never knew when a P-3 or its equivalent would turn up overhead, dropping sonobuoys and then, perhaps, weapons.
This sort of warfare is likely to be practicable only in relatively shallow water, not in the open seas. However, this is one of the places where submarines are most threatening. They have the best chance of finding targets, because the targets’ sea room is limited. Perhaps, at least in littoral areas, it is time for us to revive our former psychological advantage.